ROBOTYZACJA stanowiska – manipulator kartezjański
Jeden z wiodących producentów elementów do zawieszeń samochodowych, miał nieefektywny proces załadunku detali do robota, który miał je pobrać do dalszych procesów produkcyjnych. Pracownik umieszczał detal w gnieździe, a następnie czekał ok. minuty, aby robot je pobrał a następnie umieszczał kolejną sztukę w gnieździe . Takie rozwiązanie było nie tylko nieefektywne, ale także generowało straty czasowe i utrudniało płynność produkcji.
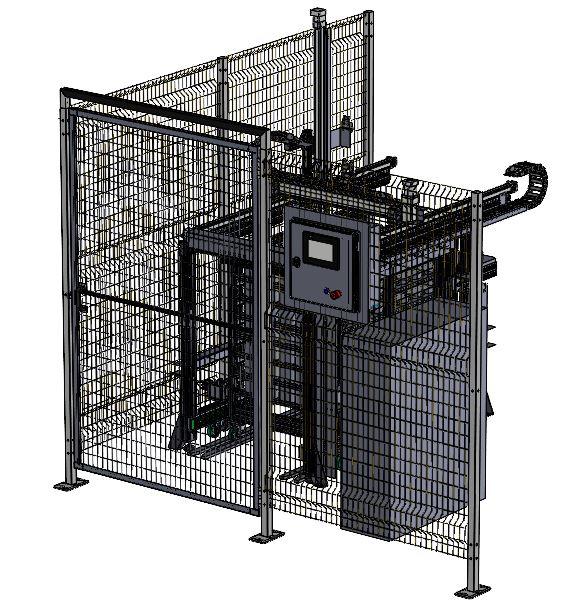
Rozwiązanie: W odpowiedzi na wyzwania stawiane przez klienta, dostarczyliśmy rozwiązanie w postaci manipulatora kartezjańskiego, który współpracował z wózkami transportowymi z szufladami. Maszyna ta została zaprojektowana do automatycznego załadunku detali dla robota, eliminując potrzebę ręcznego umieszczania detali w gnieździe przez pracownika. Urządzenie samodzielnie pobierało detale z każdego poziomu szuflad bez asysty pracownika. Zadaniem pracownika było jedynie umieszczenie wózka pełnego detali raz na kilka godzin, co znacząco zwiększyło efektywność procesu. Urządzenie oparte jest na komponentach i napędach HIWIN a dostawcą automatyki jest SIEMENS.

Wynik: Dostarczenie manipulatora kartezjańskiego przyniosło wyraźne korzyści. Automatyzacja czasochłonnego procesu ręcznego załadunku detali znacząco zwiększyła wydajność produkcji, zminimalizowała obciążenie pracownika tym zadaniem, a przy pracy maszyny na trzy zmiany pozwoliło to uwolnić niemal całkowity etat pracowniczy. Nasze rozwiązanie przyczyniło się do optymalizacji procesów produkcyjnych klienta, poprawiając efektywność pracy.